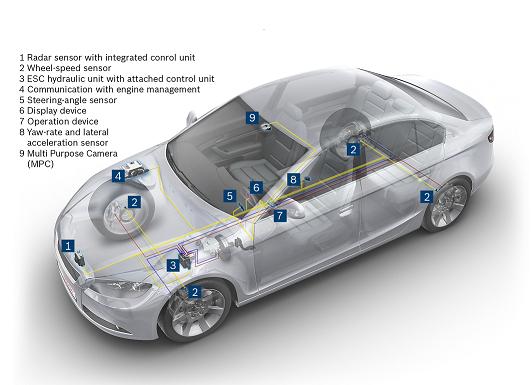
 The software behind ESC uses sensors to determine the driver’s desired vehicle position every seven milliseconds and monitors the reaction of the vehicle to his commands or external interference. Sensors constantly process measurement data on wheel speed (indicates the speed of the vehicle), steering wheel angles (recognizes the movements and position of the steering wheel), yaw rates (measures rotational movement about the vertical axis) and lateral acceleration (measures acceleration in the direction of the car’s transversal axis). The data is then used to compare actions specified by the driver, e.g. by moving the steering wheel, with the actual behavior of the vehicle. If the ESC system detects an unstable condition (for example, following a sudden evasive maneuver) it reacts within milliseconds to stabilize the vehicle through brake applications to individual wheels. A single wheel or several wheels can be controlled in this way, depending on what is required. In addition, ESC can also reduce excessive speeds effectively by reducing engine torque. See video in library.
The software behind ESC uses sensors to determine the driver’s desired vehicle position every seven milliseconds and monitors the reaction of the vehicle to his commands or external interference. Sensors constantly process measurement data on wheel speed (indicates the speed of the vehicle), steering wheel angles (recognizes the movements and position of the steering wheel), yaw rates (measures rotational movement about the vertical axis) and lateral acceleration (measures acceleration in the direction of the car’s transversal axis). The data is then used to compare actions specified by the driver, e.g. by moving the steering wheel, with the actual behavior of the vehicle. If the ESC system detects an unstable condition (for example, following a sudden evasive maneuver) it reacts within milliseconds to stabilize the vehicle through brake applications to individual wheels. A single wheel or several wheels can be controlled in this way, depending on what is required. In addition, ESC can also reduce excessive speeds effectively by reducing engine torque. See video in library.
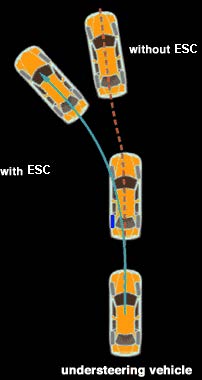
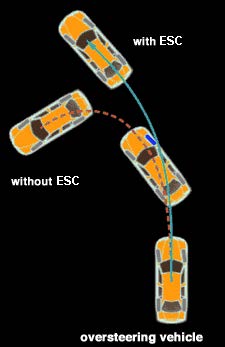
Should it be in jeopardy of oversteering and fishtailing, ESC brakes the side of the car away from the corner. If, on the other hand, there is a danger of the vehicles understeering and heading straight ahead rather than cornering, ESC brakes the vehicles curve-side wheels. If the road is slippery on just one side, active brake control likewise generates one-sided forces that help the driver to keep the vehicle moving in the desired direction. Apart from triggering brake intervention, ESC can also throttle the engines torque, thereby reducing the speed at which the vehicle is traveling. ESC is always in readiness and effective on every type of road or terrain.